WrinTac based on Bending Actuation
Published:
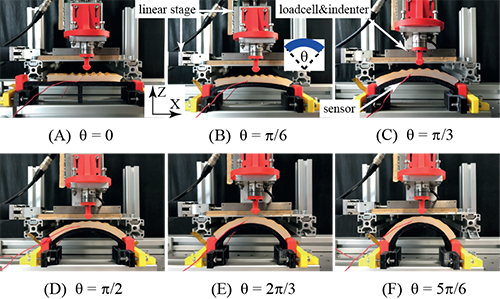
This is an extension work based on WrinTac previously proposed in here. We further modified the design of WrinTac to suit for robotic finger application, and implemented WrinTac into various scenario, where tactile sensing works, including force sensing, shape classification and texture detection. Here, WrinTac can morph by bending actuation that is more suitable for finger-like applications. We thoroughly investigated these cases using several machine learning and deep learning methods and eventually found the optimal morphological state for each case. In this work, we demonstrated the possibility to enhance tactile sensing and perception by morphological computation/adaptation rather than by varying sensorimotor control strategy.
This work is now published in Robotics and Automation Letters, and was presented at International Conference on Soft Robotics (RoboSoft) 2020 as Best Paper Finalist. Access the paper at IEEE Xplore.