WrinTac based on Stretching Actuation
Published:
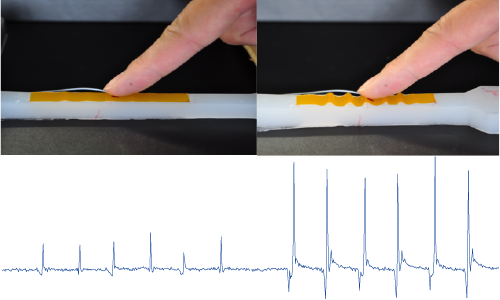
Inspired by the morphological influence of human fingertips on tactile sensing and perception as illustrated in the cover figure, we proposed the wrinkled tactile sensor with variable and adaptive morphology (WrinTac) as shown in below figure. The fundamental idea is that the sensor, in order to get optimal performance, can adapt the morphology to specific task or environment. In collaboration with Prof. Shinichi Hirai, we modeled the wrinkling behavior and characterized the morphing capability enabled by stretching actuation. We then tested WrinTac preliminarily in several tasks including normal force sensing, tangential force sensing and shape classification and found that WrinTac can behave differently when it is under different morphology.
This work is now published in Robotics and Automation Letters, and was presented at International Conference on Robotics and Automation (ICRA) 2019. Access the paper at IEEE Xplore.