BPActuators: Lightweight and Low-Cost Soft Actuators by Balloons and Plastics
Published:
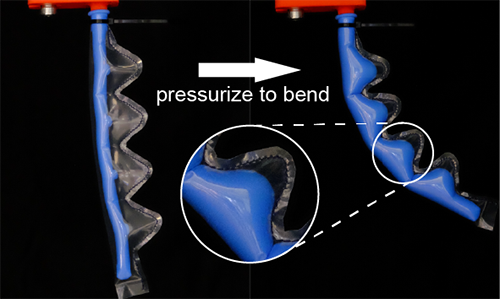
We proposed a novel mechanism for low-cost soft bending actuators. The mechanism consists of an internal balloon and an external plastic constrain layer, as shown in below figure. When pressurized, the actuator can generate bending deformation that can be used for driving. We verified the performance of actuators with different geometrical parameters and finally demonstrated the potential in application such as soft grippers.
This work was presented at the 4th International Conference on Soft Robotics RoboSoft2021. Access the paper frome here. A further study was presented at the ACM 12th Augmented Human International Conference AH 2021. This work was also reported on “日刊工業新聞”, a popular local newspaper specialized in Technology and Business (14-5-2021).