Cost-effective Tactile Skin based on Conductive Polymers
Published:
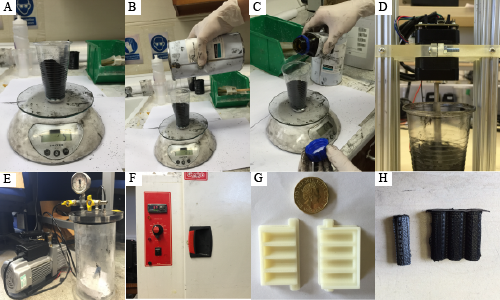
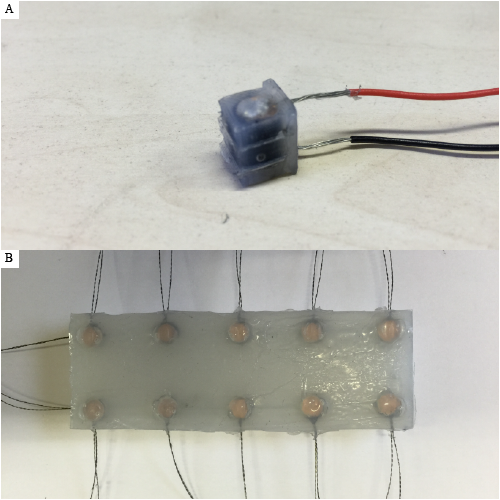
During my master study in HAMMER laboratory (King’s College London) supervised by Prof. Hongbin Liu, I looked at the design of a tactile skin using conductive polymers made from carbon black and silicone rubber (PDMS). I synthetized the material, studied the conducting theory and property (Quantum Tunneling), and came up with a single-cell sensor design and a multi-cell skin design before I performed the characterization of these two prototypes. Through this preliminary study, I verified the possibility to fabricate a soft tactile and cost-efficient robotic skin with custimized conductive polymer.